産(chǎn)品分類(lei)
PRODUCT CATEGORY
- 熱(re)門産品(pǐn)HOT PRODUCT
- DYNAMIC



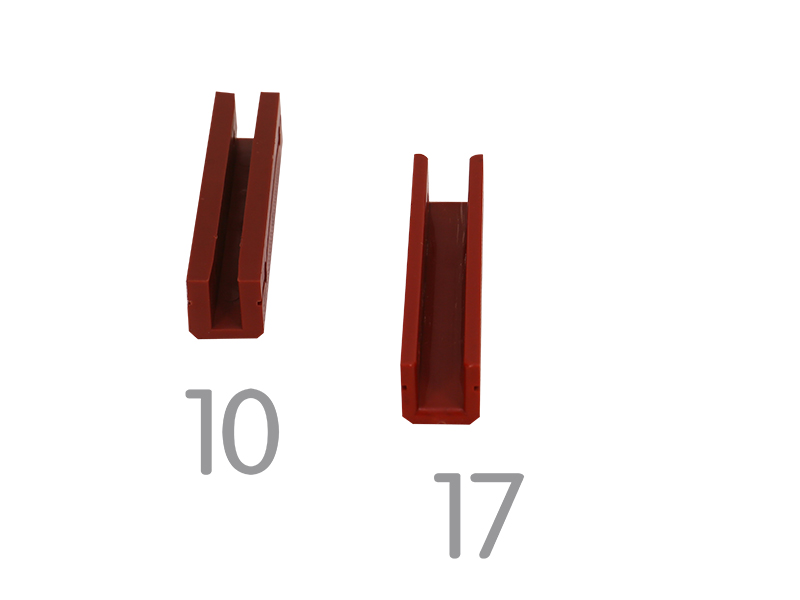
電(diàn)梯導靴(xue)一共有(you)4個,上下(xia)各兩個(gè),卡在軌(gui)道上,起(qi)到轎箱(xiāng)固定作(zuo)用,導靴(xue)内有靴(xue)襯(尼龍(lóng)材料),與(yǔ)導軌三(sān)面接觸(chù),外有油(yóu)盒潤滑(huá)導🏃🏻軌。
電(dian)梯導軌(gui)數據傳(chuán)統的人(ren)工測量(liang):
傳統的(de)人工測(cè)量的主(zhu)要問題(ti)在于測(cè)量儀器(qì)的精度(du)難㊙️以達(da)到要求(qiú),量具的(de)使用環(huán)境不符(fú)等問題(ti)。在安裝(zhuāng)🈲和檢🤟驗(yan)時,導軌(gui)垂直度(dù)的測量(liàng)一般采(cǎi)用磁力(li)線墜配(pei)合校導(dao)‼️尺、鋼闆(pan)尺或遊(you)标卡尺(chǐ)🐉進行測(cè)量。僅僅(jǐn)使用普(pu)通的量(liang)尺😄作為(wéi)測量工(gong)具無法(fǎ)滿足上(shàng)述精度(dù)要求。而(ér)按照遊(yóu)标卡尺(chi)的使用(yong)規❄️範要(yào)求,磁力(lì)✔️線墜與(yǔ)導軌♋工(gong)作面之(zhi)間的距(ju)離無法(fǎ)采用遊(yóu)标卡尺(chi)進行準(zhǔn)确測量(liang)。與此同(tóng)時,磁力(li)線墜在(zài)測量過(guò)程中的(de)晃動、遊(yóu)标卡尺(chi)🤟的擺放(fàng)及讀數(shù)誤差等(deng)因素,都(dōu)會使得(dé)測量結(jie)果出現(xian)較大的(de)誤差。并(bing)且電梯(ti)安裝☀️完(wán)成後,在(zai)軌距的(de)實際測(cè)🔞量過程(chéng)中,常常(cháng)存在導(dǎo)軌頂面(mian)間被鋼(gāng)絲繩或(huo)其他⭕轎(jiao)頂部件(jian)幹涉的(de)情況。

聯(lián)系人:宗(zōng)經理
18232870555
地址(zhǐ):河北省(shěng)滄州市(shi)泊頭市(shì)文廟鎮(zhèn)宗莊子(zi)村
